 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMASR: Self-Reflective Reasoning through Multimodal Hierarchical Attention Focusing for Agent-based Video Understanding
Apr 28, 2025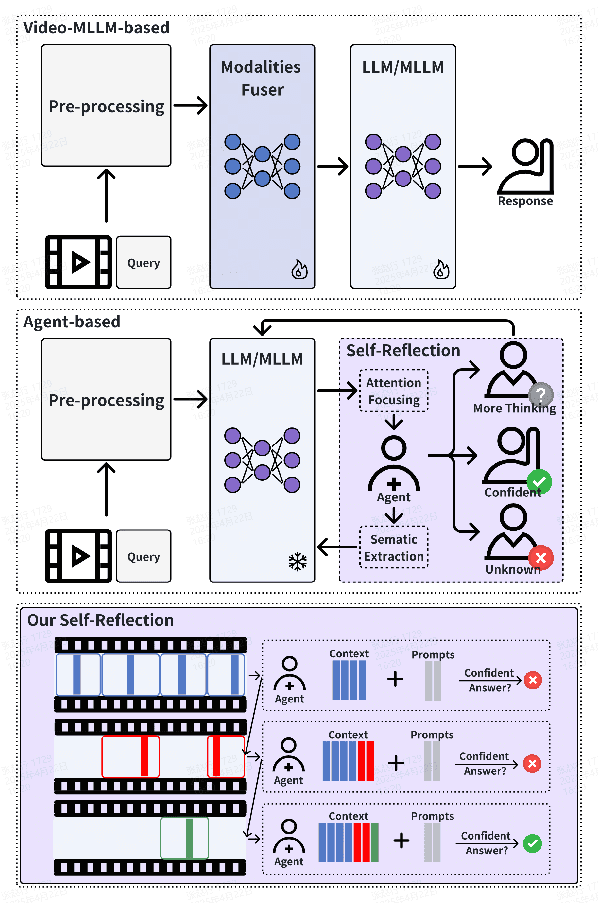
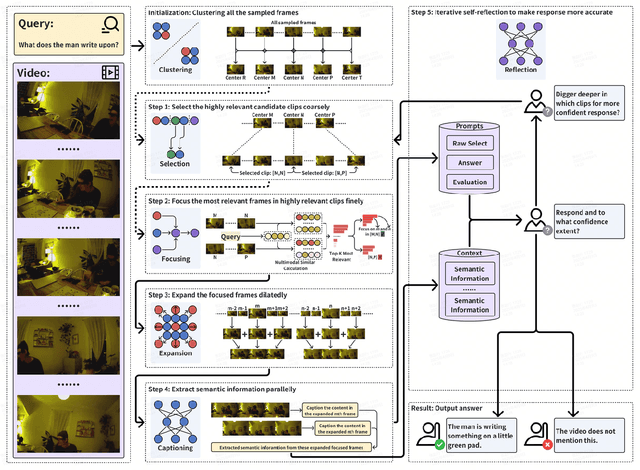
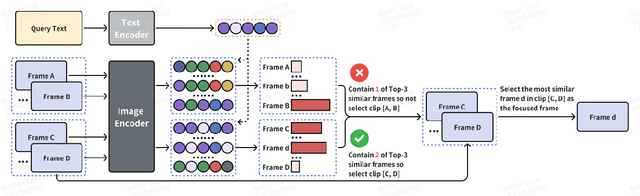
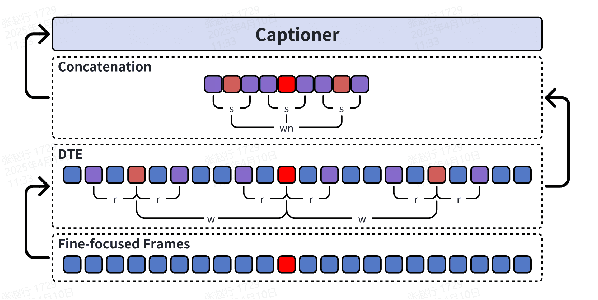
Even in the era of rapid advances in large models, video understanding remains a highly challenging task. Compared to texts or images, videos commonly contain more information with redundancy, requiring large models to properly allocate attention at a global level for comprehensive and accurate understanding. To address this, we propose a Multimodal hierarchical Attention focusing Self-reflective Reasoning (MASR) framework for agent-based video understanding. The key innovation lies in its ability to detect and prioritize segments of videos that are highly relevant to the query. Firstly, MASR realizes Multimodal Coarse-to-fine Relevance Sensing (MCRS) which enhances the correlation between the acquired contextual information and the query. Secondly, MASR employs Dilated Temporal Expansion (DTE) to mitigate the risk of missing crucial details when extracting semantic information from the focused frames selected through MCRS. By iteratively applying MCRS and DTE in the self-reflective reasoning process, MASR is able to adaptively adjust the attention to extract highly query-relevant context and therefore improve the response accuracy. In the EgoSchema dataset, MASR achieves a remarkable 5% performance gain over previous leading approaches. In the Next-QA and IntentQA datasets, it outperforms the state-of-the-art standards by 0.2% and 0.3% respectively. In the Video-MME dataset that contains long-term videos, MASR also performs better than other agent-based methods.
GPO: Global Plane Optimization for Fast and Accurate Monocular SLAM Initialization
May 24, 2020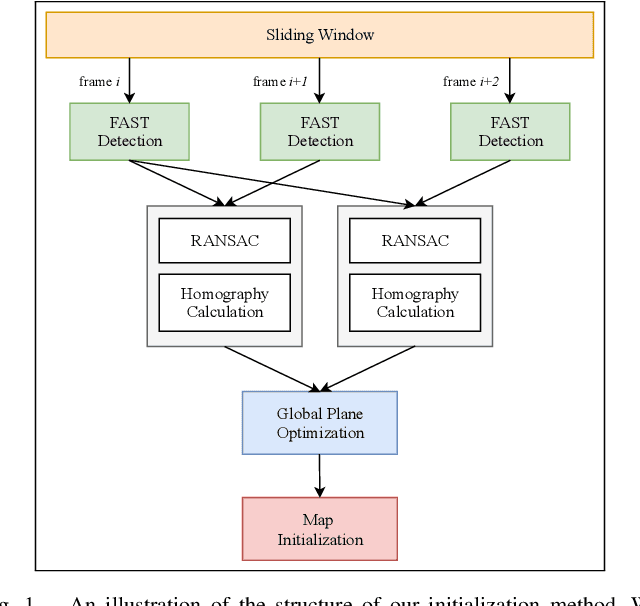
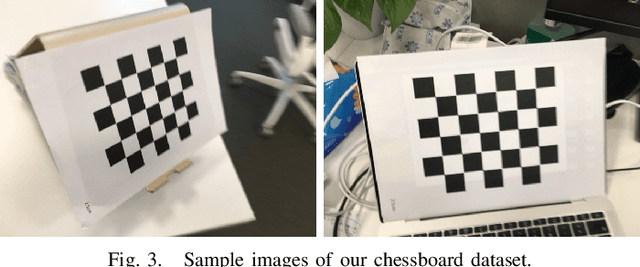
Initialization is essential to monocular Simultaneous Localization and Mapping (SLAM) problems. This paper focuses on a novel initialization method for monocular SLAM based on planar features. The algorithm starts by homography estimation in a sliding window. It then proceeds to a global plane optimization (GPO) to obtain camera poses and the plane normal. 3D points can be recovered using planar constraints without triangulation. The proposed method fully exploits the plane information from multiple frames and avoids the ambiguities in homography decomposition. We validate our algorithm on the collected chessboard dataset against baseline implementations and present extensive analysis. Experimental results show that our method outperforms the fine-tuned baselines in both accuracy and real-time.